
CREAN EN LA UNAM EXOESQUELETO ROBÓTICO PARA REHABILITAR LESIONES DE MUÑECAS
_ Para ayudar a quienes tienen inmovilidad por embolias o accidentes, Miguel Ãngel Padilla y Juan Salvador Pérez, del CCADET, desarrollan un prototipo de bajo costo con partes mecánicas, sensores, software y visualización
Para apoyar a personas que han perdido la movilidad de sus muñecas a causa de una embolia, de algún accidente deportivo o de trabajo, un grupo de expertos del Centro de Ciencias Aplicadas y Desarrollo Tecnológico (CCADET) de la UNAM desarrolla un exoesqueleto robótico con el fin de rehabilitar lesiones en esa parte del cuerpo, ubicada entre los brazos y las manos.
En los últimos dos años, los académicos Miguel Ãngel Padilla Castañeda y Juan Salvador Pérez Lomelà se han dedicado a la planeación, diseño y construcción de un primer prototipo, capaz de producir tres movimientos básicos: uno semejante a seguir la forma de un abanico (llamado aducción-abducción), otro de arriba para abajo (pronación-supinación) y un tercero parecido a estirar la mano para mover una espada (flexión-extensión).
“Con ello los pacientes pueden tener rehabilitación ortopédica y ensayar una y otra vez la relación entre la función mecánica de la muñeca y la orden neuromotora que viene del cerebroâ€, explicó Pérez LomelÃ, diseñador industrial y maestro en sistemas de diseño asistido por computadora.
Mecánico y visible en tiempo real
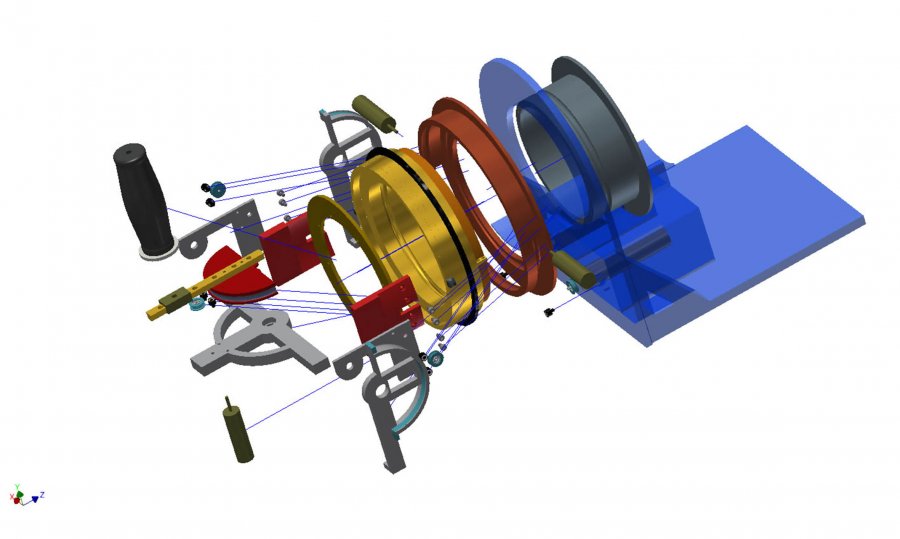
El dispositivo, formado por una base fija y tres cÃrculos para cada uno de los movimientos, mide 25 centÃmetros de largo y tiene un diámetro interior a 14 centÃmetros y otro exterior de 20.
“Actualmente lo construimos de plástico PLA para las pruebas iniciales, pero el primer prototipo con la parte mecánica, que estará listo en julio de 2016, será de acero fundido y maquinadoâ€, detalló.
Ya con la parte mecánica, que se construye en el Taller de Prototipos del CCADET, los especialistas dedicarán el siguiente año a completar el dispositivo con cuatro motores de precisión suizos, de ocho a 10 sensores de movimiento, angulación y visuales, un monitor y un software que actualmente desarrolla Padilla Castañeda (ingeniero en computación, maestro en ciencias de la computación y doctor en tecnologÃas de la innovación y robótica).
“La idea es que la rehabilitación mecánica se pueda vigilar visualmente en tiempo real para saber si cada ejercicio se realiza de forma correcta y si el paciente tiene avancesâ€, añadió Pérez LomelÃ.
Se espera que el prototipo completo, con la parte de software y visualización, esté listo en 2017 para probarse con pacientes del Hospital General de México Dr. Eduardo Liceaga, dentro del cual el CCADET tiene la Unidad de Investigación y Desarrollo Tecnológico.
“Lo más importante son las pruebas con pacientes que tienen problemas de inmovilidad por diversos motivos, que sea útil para su rehabilitación y de bajo costo para que puedan adquirirlo hospitales especializadosâ€, dijo.
En naciones desarrolladas de Europa y en Estados Unidos existen prototipos más sofisticados, pero son costosos e inaccesibles para la mayorÃa de los mexicanos.
“Con un exoesqueleto que tenga las funciones básicas podemos ayudar a mucha gente de nuestro paÃs y de América Latinaâ€, destacó.
Mientras trabajan en este proyecto, ya se piensa en la protección con una patente o modelo industrial, asà como en una versión portátil, que algunos pacientes podrÃan llevar a sus hogares.
“En un segundo prototipo podremos ensayar con un modelo portátil, quizá construido de materiales termoplásticos resistentes, que podrÃa fabricarse mediante manufactura rápida por impresión 3Dâ€, finalizó.
Para apoyar a personas que han perdido la movilidad de sus muñecas a causa de una embolia, de algún accidente deportivo o de trabajo, un grupo de expertos del Centro de Ciencias Aplicadas y Desarrollo Tecnológico (CCADET) de la UNAM desarrolla un exoesqueleto robótico con el fin de rehabilitar lesiones en esa parte del cuerpo, ubicada entre los brazos y las manos.
En los últimos dos años, los académicos Miguel Ãngel Padilla Castañeda y Juan Salvador Pérez Lomelà se han dedicado a la planeación, diseño y construcción de un primer prototipo, capaz de producir tres movimientos básicos: uno semejante a seguir la forma de un abanico (llamado aducción-abducción), otro de arriba para abajo (pronación-supinación) y un tercero parecido a estirar la mano para mover una espada (flexión-extensión).
“Con ello los pacientes pueden tener rehabilitación ortopédica y ensayar una y otra vez la relación entre la función mecánica de la muñeca y la orden neuromotora que viene del cerebroâ€, explicó Pérez LomelÃ, diseñador industrial y maestro en sistemas de diseño asistido por computadora.
Mecánico y visible en tiempo real
El dispositivo, formado por una base fija y tres cÃrculos para cada uno de los movimientos, mide 25 centÃmetros de largo y tiene un diámetro interior a 14 centÃmetros y otro exterior de 20.
“Actualmente lo construimos de plástico PLA para las pruebas iniciales, pero el primer prototipo con la parte mecánica, que estará listo en julio de 2016, será de acero fundido y maquinadoâ€, detalló.
Ya con la parte mecánica, que se construye en el Taller de Prototipos del CCADET, los especialistas dedicarán el siguiente año a completar el dispositivo con cuatro motores de precisión suizos, de ocho a 10 sensores de movimiento, angulación y visuales, un monitor y un software que actualmente desarrolla Padilla Castañeda (ingeniero en computación, maestro en ciencias de la computación y doctor en tecnologÃas de la innovación y robótica).
“La idea es que la rehabilitación mecánica se pueda vigilar visualmente en tiempo real para saber si cada ejercicio se realiza de forma correcta y si el paciente tiene avancesâ€, añadió Pérez LomelÃ.
Se espera que el prototipo completo, con la parte de software y visualización, esté listo en 2017 para probarse con pacientes del Hospital General de México Dr. Eduardo Liceaga, dentro del cual el CCADET tiene la Unidad de Investigación y Desarrollo Tecnológico.
“Lo más importante son las pruebas con pacientes que tienen problemas de inmovilidad por diversos motivos, que sea útil para su rehabilitación y de bajo costo para que puedan adquirirlo hospitales especializadosâ€, dijo.
En naciones desarrolladas de Europa y en Estados Unidos existen prototipos más sofisticados, pero son costosos e inaccesibles para la mayorÃa de los mexicanos.
“Con un exoesqueleto que tenga las funciones básicas podemos ayudar a mucha gente de nuestro paÃs y de América Latinaâ€, destacó.
Mientras trabajan en este proyecto, ya se piensa en la protección con una patente o modelo industrial, asà como en una versión portátil, que algunos pacientes podrÃan llevar a sus hogares.
“En un segundo prototipo podremos ensayar con un modelo portátil, quizá construido de materiales termoplásticos resistentes, que podrÃa fabricarse mediante manufactura rápida por impresión 3Dâ€, finalizó.

